Peilin Wu 吴沛琳Hello! I am an undergraduate student of the IEEE Honor Class in Shanghai Jiao Tong University (SJTU), majoring in Computer Science and Technology. I am currently a research intern at Harvard Embodied Minds Lab, supervised by Prof. Yilun Du, focusing on world models for robotics, with an emphasis on multimodality, real-world adaptation, and embodiments. I'm also a member of Apex Data & Knowledge Management Lab, advised by Prof. Weinan Zhang. Previously, I'm a research intern at Shanghai AI Lab working on foundation models and humanoid robots. My general research interests lie at the intersection of robotics and machine learning. My previous work has focused on implementing learning-based techniques to address policy adaptation challenges in quadruped locomotion. For future research, I am particularly interested in general robotics topics, including:
CV / Email / GitHub / Google Scholar |
|
PublicationsI'm interested in robotics, generative AIs and reinforcement learning. |
|
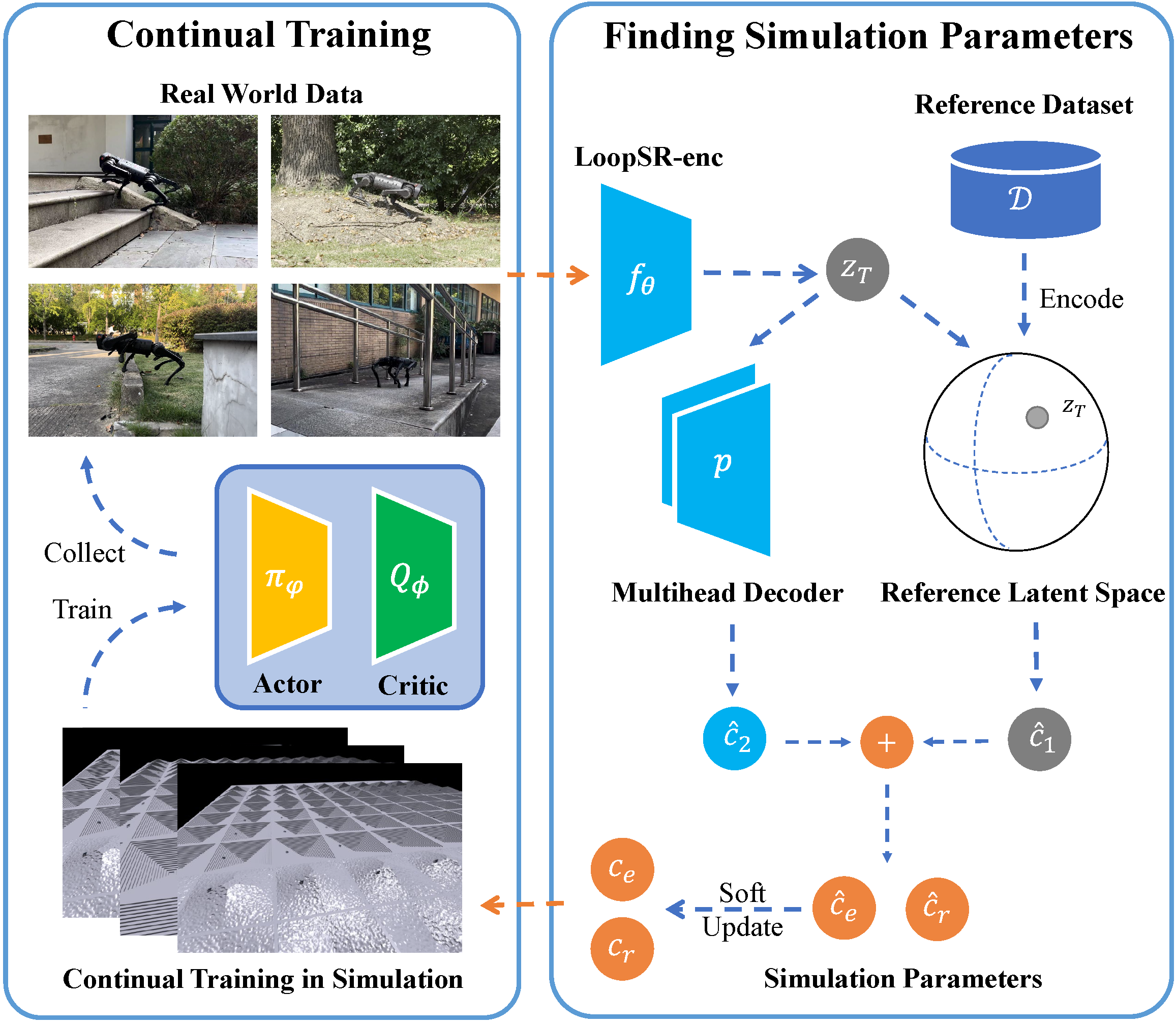
LoopSR: Looping Sim-and-Real for Lifelong Policy Adaptation of Legged RobotsPeilin Wu, Weiji Xie, Jiahang Cao, Hang Lai, Weinan Zhang IROS, 2025 website / code / youtube / paper This project looked into the lifelong policy adaptation situation. The idea behind was that attention should be paid to leveraging real-world data to fine-tune the policy continuously. The work proposed a pipeline to loop simulated training and real-world data collection, with only a limited amount of data to yield eminent performance in both sim-to-sim and sim-to-real experiments. |
|
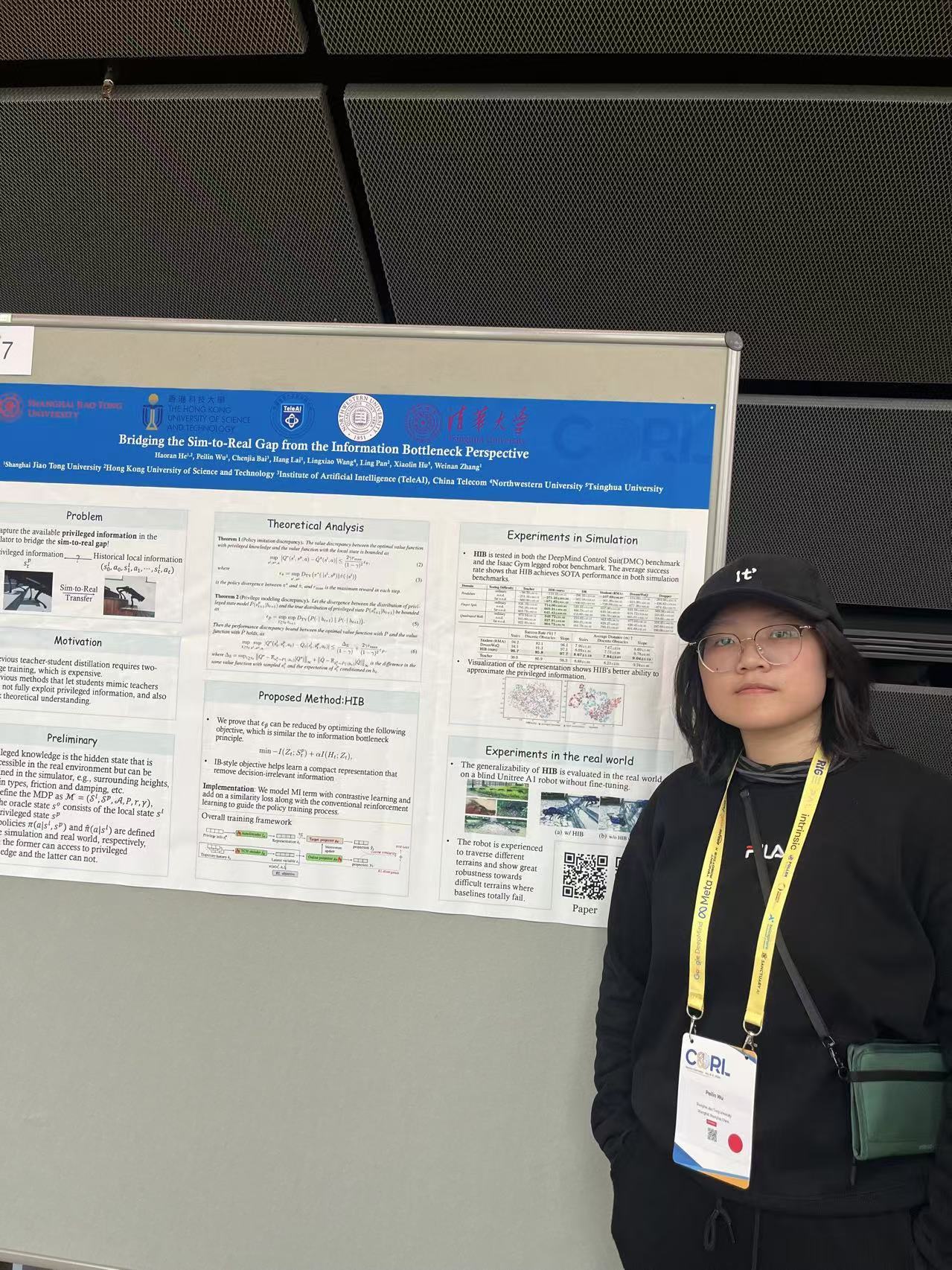
Bridging the Sim-to-Real Gap from the Information Bottleneck PerspectiveHaoran He, Peilin Wu, Chenjia Bai, Hang Lai, Lingxiao Wang, Ling Pan, Xiaolin Hu, Weinan Zhang CoRL (Oral), 2024 website / code / paper This paper focused on modeling the privileged knowledge distillation problem from a theory-based perspective, where we provided mathematical analysis and a simple but effective framework HIB for the problem. Empirical experiments on both simulated and real-world tasks demonstrate that HIB yields improved generalizability compared to previous methods, which achieved about a 10% performance boost compared with baselines in various tasks. |
Services |
| Conference Reviewer: ICRA 2025, ICRA 2026, TPAMI 2026 |
|
Design and source code from Jon Barron's website |